作为Javaer,对于Map这个单词绝对不会陌生,无论是开发过程中还是出去面试的时候,都会经常遇到,而最频繁使用和面试提问的无非这么几个,HashMap, HashTable, ConcurrentHashMap。那么本文就针对这几个知识点做一个归纳和总结。
从HashMap说起
HashMap是上面提到的几个Map中使用频率最高的了,毕竟需要考虑到多线程并发的场景并不算太多。下面是Map的一个关系图,大家了解一下即可。
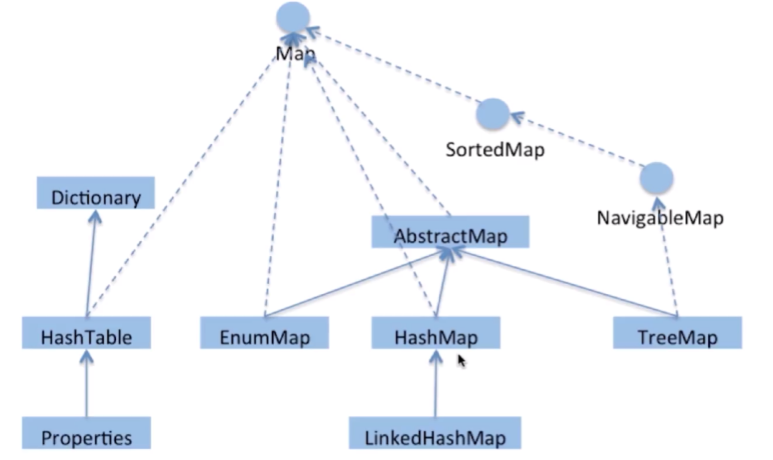
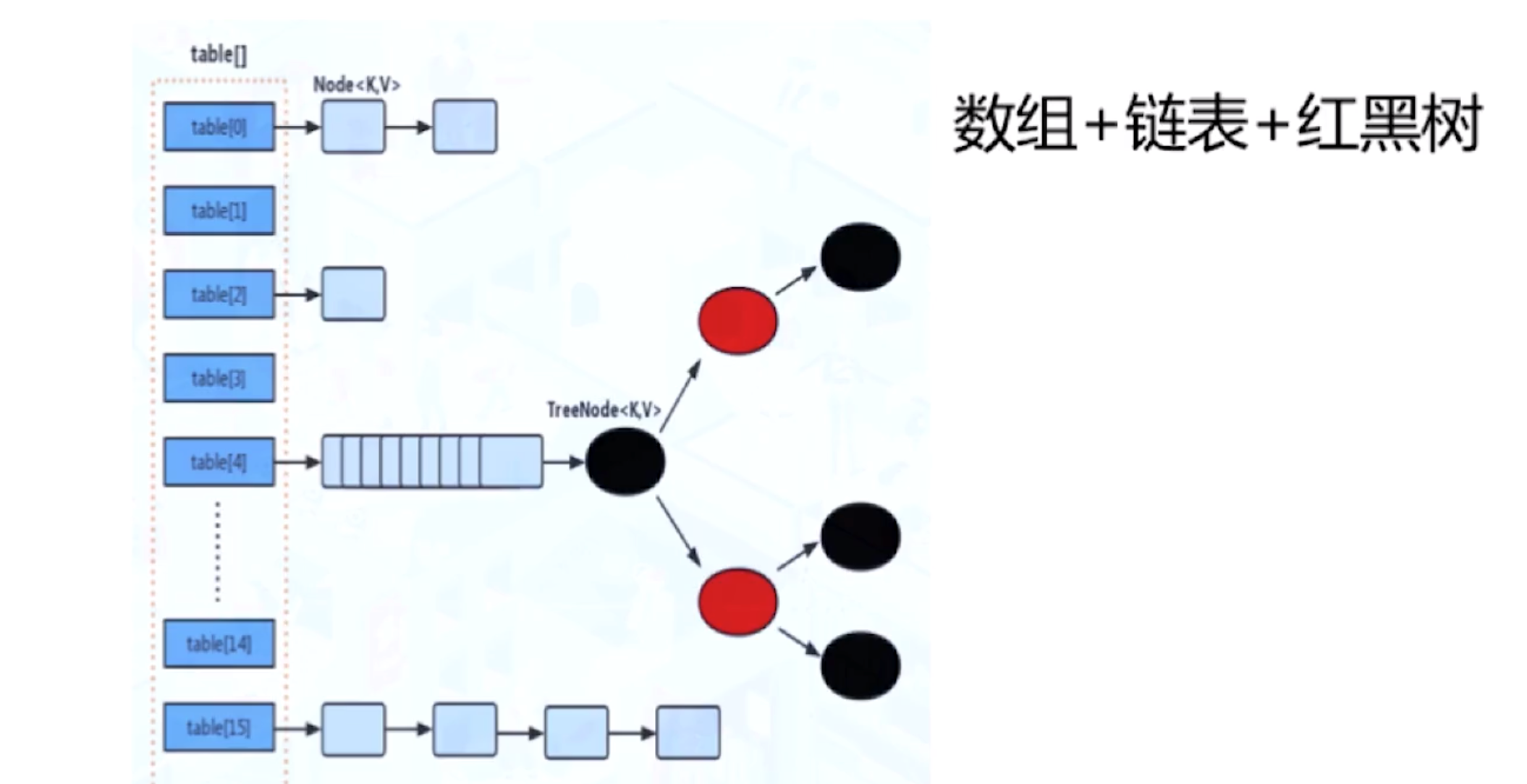
HashMap在Java8之前和之后有很大差别,在Java8以前,它的数据结构是数组+链表的形式,8以后就变成了数组+链表+红黑树的结构。它的key是保存在一个Set里面的,也就是有去重的功能,values是存在一个Collections里面。
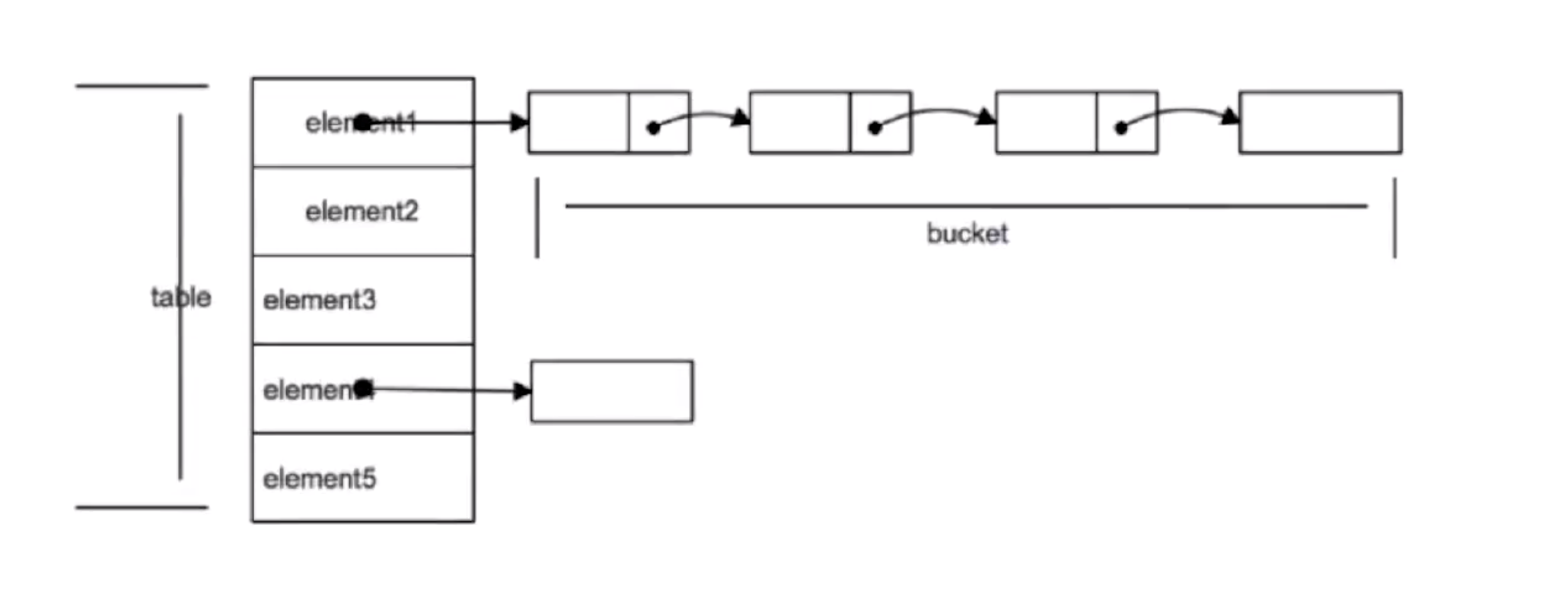
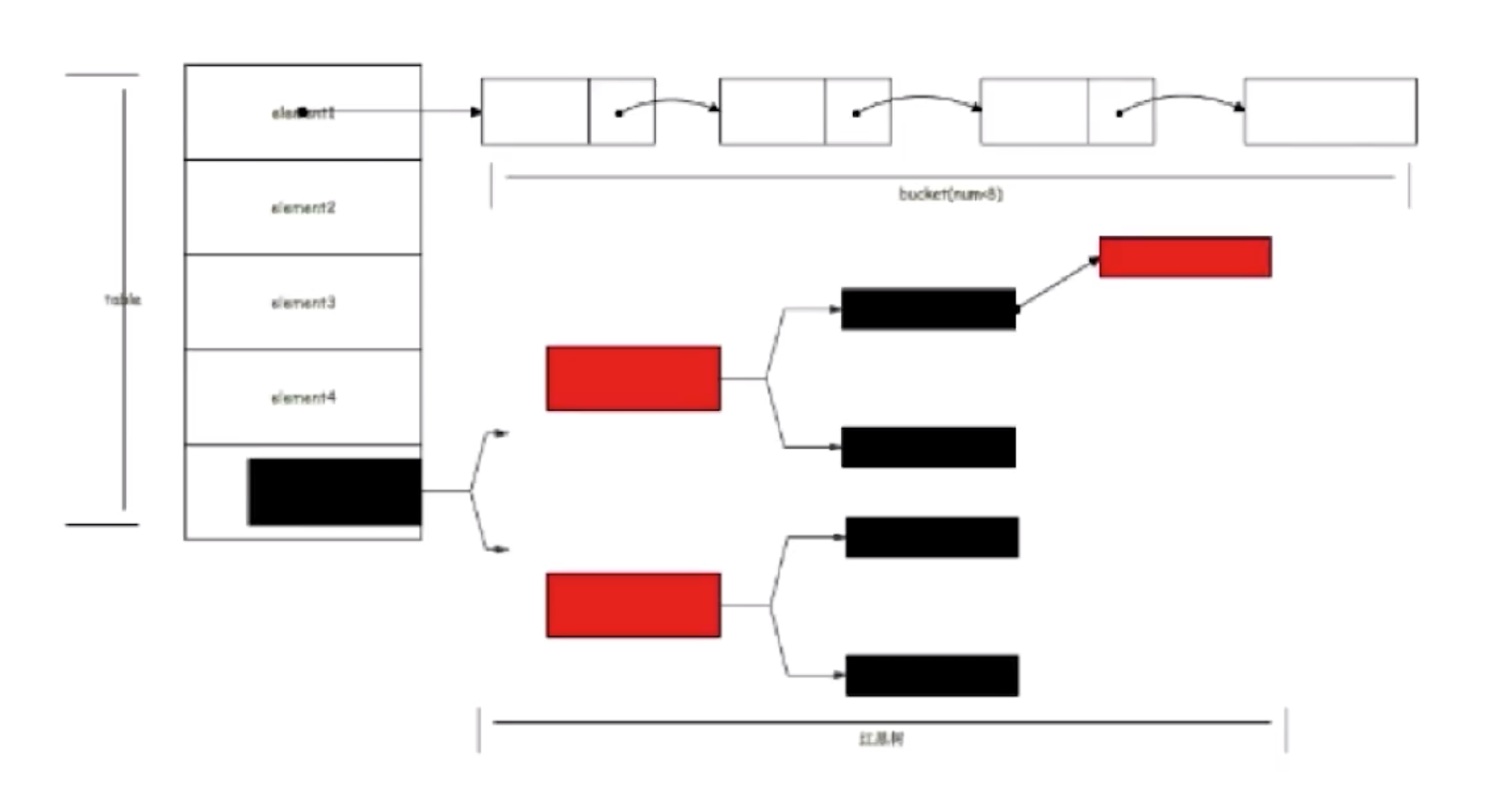
HashMap里的数组每个元素存放的是key-value形式的实例,Java7里面叫做Entry,8里面叫Node。这个Node里面包含了hash值,键值对,下一个节点next这几个属性组成。数组被分为一个个bucket,也就是桶,通过hash值决定了键值对在这个数组中的寻址,hash值相同的则以链表的形式存储,链表长度超过阈值就转成红黑树。那么先来看看HashMap的put操作,
final V putVal(int hash, K key, V value, boolean onlyIfAbsent,
boolean evict) {
Node<K,V>[] tab; Node<K,V> p; int n, i;
//为空则初始化
if ((tab = table) == null || (n = tab.length) == 0)
n = (tab = resize()).length;
// 算出键值对在table中的具体位置,没有就new一个node
if ((p = tab[i = (n - 1) & hash]) == null)
tab[i] = newNode(hash, key, value, null);
else {
// 如果存在
Node<K,V> e; K k;
//一样就替换
if (p.hash == hash &&
((k = p.key) == key || (key != null && key.equals(k))))
e = p;
//树化了就用树的形式保存
else if (p instanceof TreeNode)
e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
else {
//链表的形式插入元素
for (int binCount = 0; ; ++binCount) {
if ((e = p.next) == null) {
p.next = newNode(hash, key, value, null);
if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st
treeifyBin(tab, hash);
break;
}
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
break;
p = e;
}
}
// 存在就更新
if (e != null) { // existing mapping for key
V oldValue = e.value;
if (!onlyIfAbsent || oldValue == null)
e.value = value;
afterNodeAccess(e);
return oldValue;
}
}
++modCount;
//超过阈值就扩容
if (++size > threshold)
resize();
// 这是为了继承HashMap的LinkedHashMap类服务的,用来回调移除最早放入Map的对象
afterNodeInsertion(evict);
return null;
}
那么总结一下就是:
- 若HashMap未被初始化,则进行初始化操作
- 对Key求Hash值,依据Hash值计算下标
- 若未发生碰撞,则直接放入桶中
- 若发生碰撞,则以链表的方式链接到后面
- 若链表长度超过阈值,且HashMap元素超过最低树化容量,则将链表转成红黑树
- 若节点已经存在,则用新值替换旧值
- 若桶满了,就需要resize(扩容2倍后重排)
这个put的操作引申出几个知识点,首先,
HashMap的初始容量是多少?为什么设置成这个值呢?
翻看源码我们可以看到有这么一个变量DEFAULT_INITIAL_CAPACITY,
/**
* The default initial capacity - MUST be a power of two.
*/
static final int DEFAULT_INITIAL_CAPACITY = 1 << 4; // aka 16
这个就是HashMap的初始容量,也就是16,为啥用位运算这么骚的写法是因为位运算比算数计算的效率要高。那么为啥用16?看看上面说的下标计算的公式: index = HashCode(Key) & (Length- 1),当长度为16时候,Length-1的二进制就是1111,是一个所有位都为1的数,而且看上述注释,建议的HashMap的初始长度都是2的幂次方,这种情况下,index的结果等同于HashCode后几位的值。那么只要输入的HashCode本身分布均匀,Hash算法的结果就是均匀的。
另一个问题,Java8里面引入了红黑树,当链表达到一定长度的时候会转换成红黑树,引入红黑树的好处是什么?这个变换的阈值是多少,为什么是这个值?
当元素put的时候,首先是要根据哈希函数和长度计算下标的,但即使哈希函数取得再好,也很难达到元素百分百均匀分布,那么就有可能导致 HashMap 中有大量的元素都存放到同一个桶中时,这个桶下有一条长长的链表,这个时候 HashMap 就相当于一个单链表,假如单链表有 n 个元素,遍历的时间复杂度就是 O(n),完全失去了它的优势。
引入红黑树后,但链表长度大于8时,就会转换成红黑树,若链表元素个数小于等于6时,树结构还原成链表。至于为什么是8,我看到过两个说法,一个是因为红黑树的平均查找长度是log(n),长度为8的时候,平均查找长度为3,如果继续使用链表,平均查找长度为8/2=4,这才有转换为树的必要。链表长度如果是小于等于6,6/2=3,虽然速度也很快的,但是转化为树结构和生成树的时间并不会太短。另一个说法是根据泊松分布,在负载因子默认为0.75的时候,单个hash槽内元素个数为8的概率小于百万分之一,所以将7作为一个分水岭,等于7的时候不转换,大于等于8的时候才进行转换,小于等于6的时候就化为链表。两种都有道理我觉得哪一种都是可以的。
当桶满了的时候,HashMap会进行扩容resize,它是何时并且如何扩容的呢?
当桶的容量达到长度乘以负载因子的时候就会进行扩容,默认的负载因子为0.75。
/**
* The load factor used when none specified in constructor.
*/
static final float DEFAULT_LOAD_FACTOR = 0.75f;
首先,它会创建一个新的Entry空数组,长度是原数组的2倍。然后遍历原Entry数组,把所有的Entry重新Hash到新数组。这里要进行ReHash的原因是我们知道下标的计算是跟长度有关的,长度不一样了,那么index计算的结果自然也不一样,因此需要重新Hash到新数组,rehash是一个比较耗时的过程。
接下来还是插入相关的问题,新的Entry节点在插入链表的时候,是怎么插入的?
这个问题我是在一篇博客上看到的,之前的确从未考虑过这个问题。Java8之前是头插法,就是说新来的值会取代原有的值,原有的值就顺推到链表中去,就像上面的例子一样,因为写这个代码的作者认为后来的值被查找的可能性更大一点,提升查找的效率,在Java8之后,都是所用尾部插入了。 由于在扩容的时候会存在条件竞争,如果两个线程都发现HashMap需要重新调整大小了,它们会同时试着调整大小。用头插法的话,假设原来链表是A指向B指向C,新的链表可能出现B指向A但A同时也指向B。用尾插的方法扩容保持链表元素原油的顺序,就不会出现这种链表成环的问题了。
put的时候会先判断是否碰撞,那么如何减少碰撞呢?
一般有两个方法,一个是使用扰动函数,让不同对象返回不同hashcode;一个是使用final对象,防止键值改变,并采用合适的equeals方法和hashCode方法,减少碰撞的发生。
那么对于get方法因为比较简单就不做太多详细解释,其实就是根据key的hashcode算出元素在数组中的下标,之后遍历Entry对象链表,直到找到元素为止。
SynchronizedMap
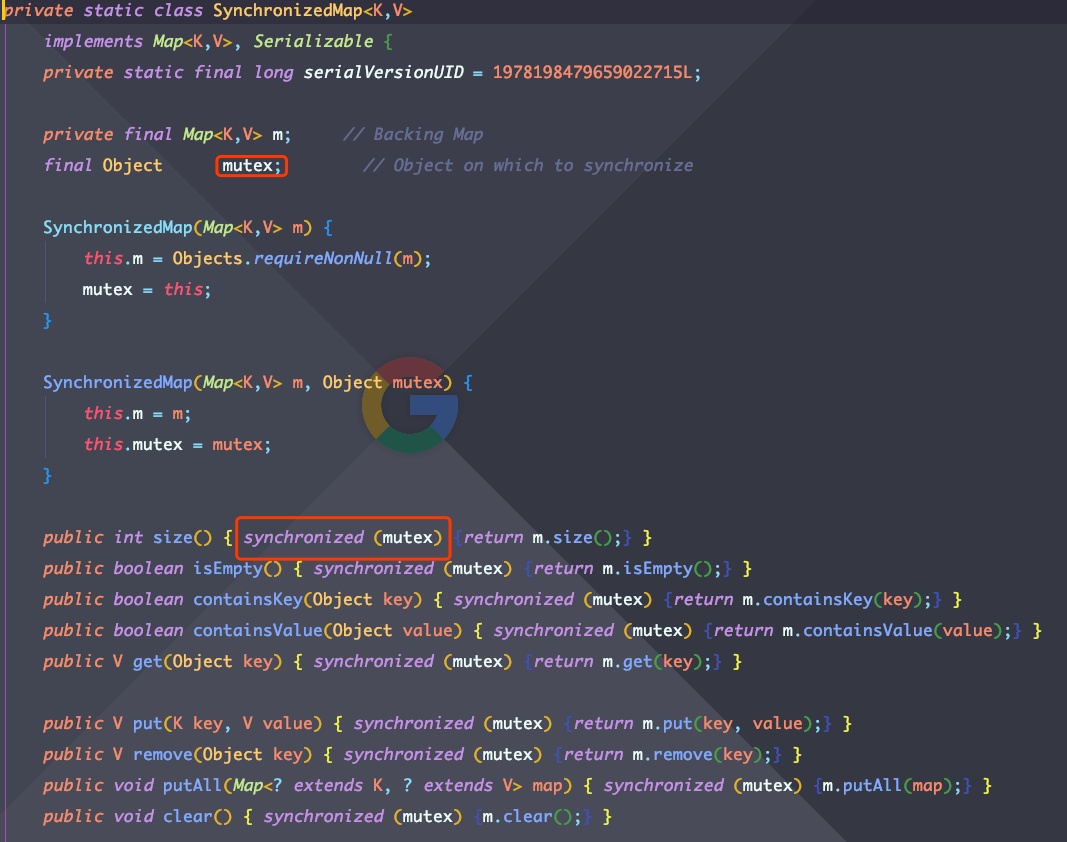
这里额外再提一个Map,也是解决HashMap多线程安全的一种方案。那就是Collections.synchronizedMap(Map)。它会返回一个线程安全的SynchronizedMap的实例。它里面维护了一个排斥锁mutex。对于里面的public方法,使用了synchronized对mutex进行加锁。多线程环境下串行化执行,效率低下。
上面就是一些关于HashMap的一些简单的知识点,我这里整理的其实也不算太多但还是很实用的(我就知道这么多)。
HashTable
关于HashTable其实说不了太多,因为说实话反正我是从来没用过。都知道它线程安全,但它用的手段很简单粗暴。涉及到修改的地方使用了synchronized修饰,以串行化方式运行,效率比较低下。它和上面说的SynchronizedMap实现线程安全的方式很接近,只是锁的对象不一样。
ConcurrentHashMap
那么还是来谈谈另一个还挺常见的ConcurrentHashMap,它现在的数据结构和原来的也是不一样的,早期也是数组+链表,现在是数组+链表+红黑树。
在Java8以前,由Segment数组、HashEntry组成,通过分段锁Segment来实现线程安全,ConcurrentHashMap内部维护了Segment内部类,继承了RetrantLock。它将锁一段一段的存储,给每一段数据分配一个锁,也就是segment,当一个线程访问一个锁时,其他线程也可以访问其他segment的数据,不会被阻塞,默认分配16个segment。也就是理论上它的效率比HashTable提高了16倍。而HashEntry跟HashMap差不多,只是它用volatile修饰了数据的value还有下一个节点next。
到了Java8,它就不再是使用Segment分段锁,而是使用了CAS+synchronized来保证线程安全。
synchronized锁住当前链表或者红黑树的首节点,这样只要哈希不冲突,就不会出现并发问题。
/**
* Table initialization and resizing control. When negative, the
* table is being initialized or resized: -1 for initialization,
* else -(1 + the number of active resizing threads). Otherwise,
* when table is null, holds the initial table size to use upon
* creation, or 0 for default. After initialization, holds the
* next element count value upon which to resize the table.
*/
private transient volatile int sizeCtl;
ConcurrentHashMap和HashMap的参数差不多,但有些特有的,比如sizeCtl。它是哈希表初始化或扩容时的一个控制位标识量,负数代表正在初始化或正在扩容操作。同样的,我们也看看它的put操作。
final V putVal(K key, V value, boolean onlyIfAbsent) {
// 键值都不能为null
if (key == null || value == null) throw new NullPointerException();
//计算key的hash值
int hash = spread(key.hashCode());
int binCount = 0;
// 数组元素的更新,使用CAS,所以需要不断失败重试
for (Node<K,V>[] tab = table;;) {
Node<K,V> f; int n, i, fh;
if (tab == null || (n = tab.length) == 0)
// 初始化
tab = initTable();
//找到f,即链表或者红黑树的头节点,没有就添加
else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) {
//CAS添加,失败break
if (casTabAt(tab, i, null,
new Node<K,V>(hash, key, value, null)))
break; // no lock when adding to empty bin
}
// 如果正在移动元素,就协助扩容
else if ((fh = f.hash) == MOVED)
tab = helpTransfer(tab, f);
else {
//发生hash碰撞,锁定链表或者红黑树的头节点f
V oldVal = null;
synchronized (f) {
// 判断f是否时链表的头节点
// fh就是头节点的hash值
if (tabAt(tab, i) == f) {
if (fh >= 0) {
//如果是,初始化链表的计数器
binCount = 1;
for (Node<K,V> e = f;; ++binCount) {
K ek;
//节点存在就更新
if (e.hash == hash &&
((ek = e.key) == key ||
(ek != null && key.equals(ek)))) {
oldVal = e.val;
if (!onlyIfAbsent)
e.val = value;
break;
}
// 不更新就插入
Node<K,V> pred = e;
if ((e = e.next) == null) {
pred.next = new Node<K,V>(hash, key,
value, null);
break;
}
}
}
//头节点是红黑树的头,用红黑树的方式插入
else if (f instanceof TreeBin) {
Node<K,V> p;
binCount = 2;
if ((p = ((TreeBin<K,V>)f).putTreeVal(hash, key,
value)) != null) {
oldVal = p.val;
if (!onlyIfAbsent)
p.val = value;
}
}
}
}
if (binCount != 0) {
//链表长度达到了8,则转换成树结构
if (binCount >= TREEIFY_THRESHOLD)
treeifyBin(tab, i);
if (oldVal != null)
return oldVal;
break;
}
}
}
// ConcurrentHashMap的size+1
addCount(1L, binCount);
return null;
}
上面是整段代码的解释,总结一下就下面几个步骤:
- 判断Node[]数组是否初始化,没有则进行初始化操作
- 通过hash定位数组的索引坐标,是否有Node节点,如果没有则使用CAS进行添加(链表的头节点),添加失败则进入下次循环
- 检查到内部正在扩容,就帮助它一块扩容
- 如果头节点f!=null,则使用synchronized锁住f元素(链表/红黑二叉树的头元素)
- 如果是Node(链表结构)则进行链表的添加操作
- 如果是TreeNode结构则执行树添加操作
- 判断链表长度已经达到临界值8,这个8可以自己调整,当节点数超过这个值就把链表转换为树结构
使用这种方式相对于Segment而言,锁拆的更细。首先使用无锁操作CAS插入节点,失败则循环重试。若头节点存在,则尝试获取头节点的同步锁再进行操作。至于get操作也比较简单,也是根据hashcode寻址,如果就在桶上就直接返回值,不是的话就按照链表或者红黑树的方式遍历获取值。
HashMap、HashTable以及ConcurrentHashMap的区别
大致讲述了他们三个的基础知识,那么来总结下它们区别。这里做了个list大家可以看看。
- HashMap线程不安全,数组+链表+红黑树
- HashTable线程安全,锁住整个对象,数组+链表
- ConcurrentHashMap线程安全,CAS+同步锁,数组+链表+红黑树
- HashMap的key,value均可为null,其他两个不可以
- HashTable使用的是安全失败机制(fail-safe),这种机制会使你此次读到的数据不一定是最新的数据。如果你使用null值,就会使得其无法判断对应的key是不存在还是为空,因为你无法再调用一次contain(key)来对key是否存在进行判断,ConcurrentHashMap同理
- HashMap 的初始容量为:16,Hashtable 初始容量为:11,两者的负载因子默认都是:0.75。
- 当现有容量大于总容量 * 负载因子时,HashMap 扩容规则为当前容量翻倍,Hashtable 扩容规则为当前容量翻倍 + 1。
- HashMap 中的 Iterator 迭代器是 fail-fast 的,而 Hashtable 的 Enumerator 不是 fail-fast 的。
- 快速失败(fail—fast)是java集合中的一种机制, 在用迭代器遍历一个集合对象时,如果遍历过程中对集合对象的内容进行了修改(增加、删除、修改),则会抛出Concurrent Modification Exception。
以上就是关于Map相关的一些知识点,里面很多引申的知识点我都没有再往深里说,比如里面使用到的红黑树数据结构,volatile关键字,CAS等等,这个在后面会针对相应的知识点再继续梳理。